Answer the question
In order to leave comments, you need to log in
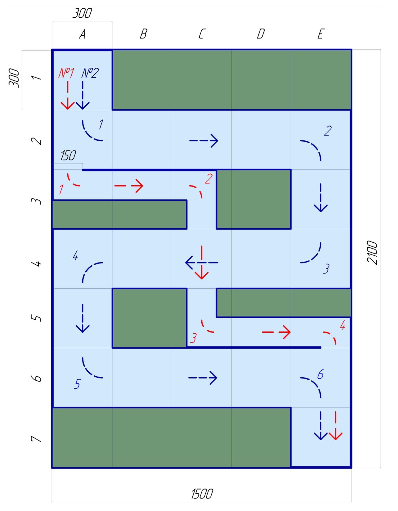
How to make a boat capable of afloat through the maze without touching the walls?
Of course, I will not ask to make a boat, but I need to understand where to start and develop a plan . List of materials that I can take in the picture. Such a boat must overcome a labyrinth with turns. In the process of passing the route, the boat should not touch the sides and the “shores of the islands”. Actually, there is no more information about this task, except that there is still quite a lot of time left to complete it. Alas, I still do not understand at all how to do this, but this is necessary in the first semester, otherwise they will be expelled. I am not an engineer, I study in a completely different specialty, but the tasks for everyone are similar, even if they do not relate to what we study at the university. They say it's for general development. Maybe someone here can give me a hint where to start.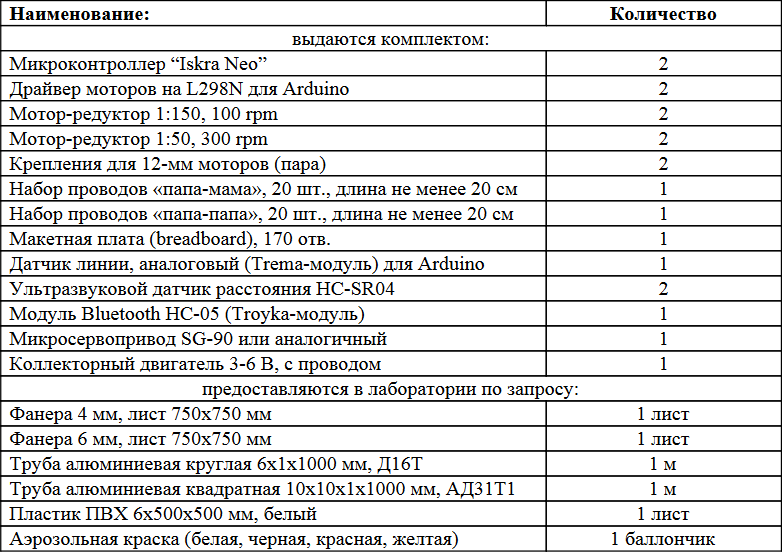
Answer the question
In order to leave comments, you need to log in
Just a few thoughts.
1. There are no requirements for the shape of the boat, so it can be spherical or cubic. With this shape, the boat will stop quickly after turning off the engine, which means it will be easier to control.
2. Align the keel with the rudder (the entire keel can turn). For a real boat, this is inconvenient, but normal for a model. This scheme will reduce the turning radius.
3. Consider the option of an aeroprop as an engine. I almost called it an airboat, but a glider is a fast, shallow draft craft, so the term would be a misnomer. And this is incompatible with point 1, because with a spherical shape and a propeller, there will be something extremely unstable. In this case, the traditional boat shape will do.
4. (If I had such a task, then I would stop at this option). As a mover - two paddle wheels - from the right and left sides, each on a separate motor. The steering wheel is not required at all, it is possible to turn on the spot when the wheels move in opposite directions. The scheme with the simplest control is, in fact, a water analog of a caterpillar tractor or tank.
And a small excursion to 1986:
2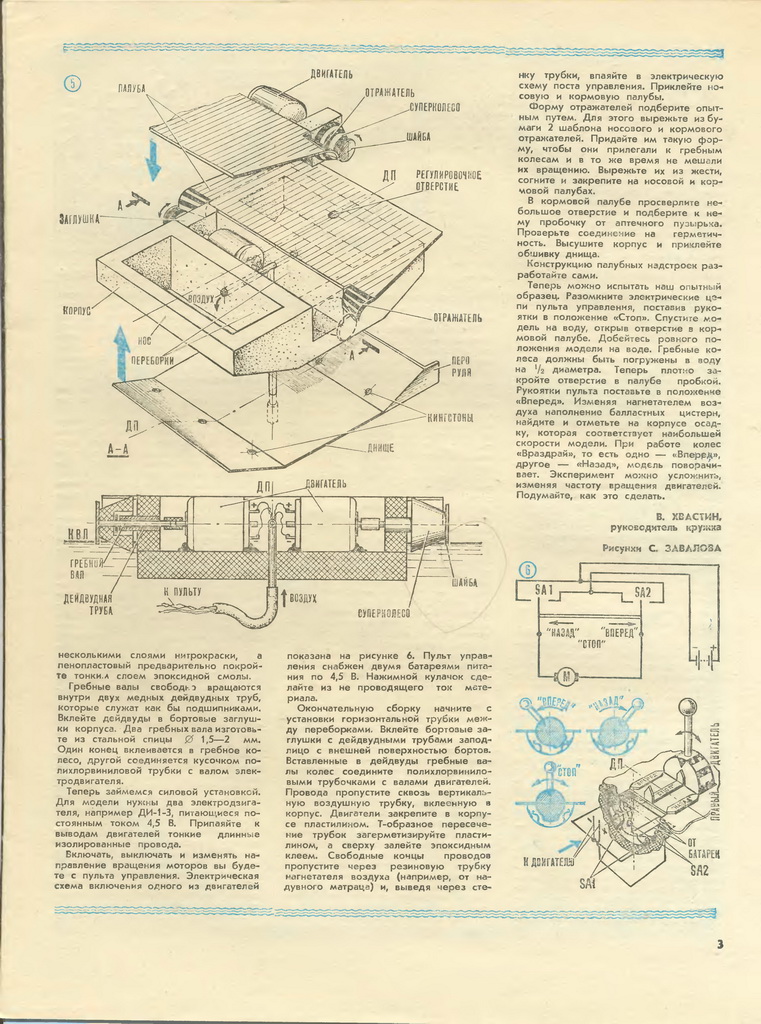
1) create an algorithm by which your Titanic will move.
2) using step 1, write a program for the microcontroller.
3) the rest is "a matter of direct hands and a file")))
In order not to touch it, it will take a long time to calibrate the boat, and it also depends on the accuracy of the sensors. Calibration includes - the dependence of the distance traveled depending on various conditions - mainly on the time of exposure to the driving force and inertia.
2 distance sensors are not enough. You need 4 to navigate correctly inside the maze. They are located at an angle of 45 degrees relative to the center line of the boat.
Next, you will need to master the PID controller and implement the algorithm for passing the maze.
Take (I took for free) the MIPT course , there will be examples of movement along the line.
The question is difficult, but solvable.
In general, the main passage of any laberinth is, first of all, to remember the previous steps, and the second rule is "hold on to the right wall with your hand." This is all I mean that the device in the future could go through labyrinths of any type.
To get acquainted with the passage of labyrinths
, here is more information.
It remains only to adapt this for the boat
Didn't find what you were looking for?
Ask your questionAsk a Question
731 491 924 answers to any question