Answer the question
In order to leave comments, you need to log in
How to convert quaternion to spherical angles of rotation?
Good afternoon!
Please tell me where you can find a mathematically painted transformation of quaternions into spherical rotation angles and vice versa. I found such a conversion program: 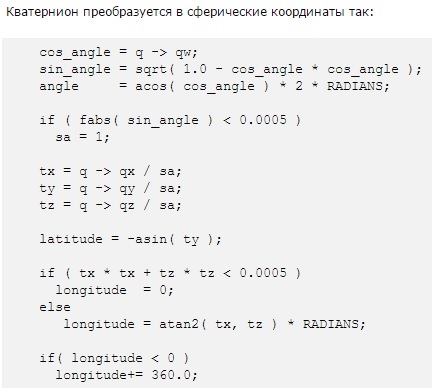 but I could not figure it out
but I could not figure it out
Answer the question
In order to leave comments, you need to log in
In any book on 3d graphics, for example for game developers. In this example, the following happens. A quaternion is a rotation around a vector, it is normalized, i.e. its length is 1, and it also has a fourth coordinate, unlike a 3d vector, so it's a 4d vector. If we say that the vector around which the rotation occurs V and the angle alpha, then q == { sin(alpha / 2) * Vx, sin(alpha / 2) * Vy, sin(alpha / 2) * Vz), cos(alpha / 2) }. The first line actually highlights the fourth component, although it would be more accurate:
half_cos_alpha = q->w;
The second line gets the sine of the half angle, according to the Pythagorean theorem, and given that V is a unit vector, thus:
half_sin_alpha = sqrt(1.0 - half_cos_alpha * half_cos_alpha)
And so on :) (considering that the text is clearly not complete and sa is not initialized at all). The idea is probably to rotate the point (unit vector) {0, 0, 1} using this quaternion, and then determine the latitude and longitude of this point (as a unit vector).
Didn't find what you were looking for?
Ask your questionAsk a Question
731 491 924 answers to any question