Answer the question
In order to leave comments, you need to log in
What is the order of feature hierarchy in convolutional neural networks?
Very often they write about CNNs that featuremaps in them are formed from simple to complex (conditionally: line detectors -> object parts detectors -> object detectors). How is this possible, if the closer the last layer is, the smaller the featuremap is? (and logically, if a featuremap represents a more complex object, then it should be larger than any conditional line or bend detector) 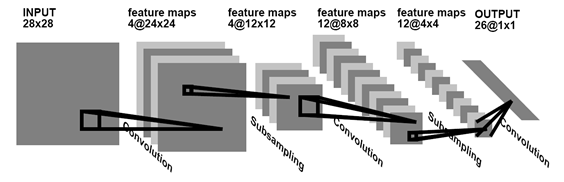
Or is it some other type of convolutional networks?
Answer the question
In order to leave comments, you need to log in
When we do pooling, we reduce overfitting, increase the receptive field, and reduce the number of calculations and parameters required.
In the context of this question, it is important for us that the receptive field increases. This means that the 5*5 filter will affect a larger area of the image (if we have conv-pool-conv-pool, then on the first layer 5*5, on the third 10*10 and so on). This makes it possible to obtain relatively cheap features that describe large areas (line detectors -> object part detectors -> object detectors).
If we did not have pooling, then we would have to increase the size of the filters from layer to layer. And this has a very bad effect on the number of parameters, and, accordingly, the depth of the network. Well, overfitting would be greater, since the more details, the easier it is for the network to catch on to a specific detail in order to correctly classify the example.
Didn't find what you were looking for?
Ask your questionAsk a Question
731 491 924 answers to any question