Answer the question
In order to leave comments, you need to log in
How to change the Kalman filter so that the result is similar to the envelope of the original signal in Matlab?
I took the implementation of the Kalman filter from these articles: https://clck.ru/FSbT2, https://habr.com/ru/post/166693/
In my task, a signal is given in the condition, which looks like this: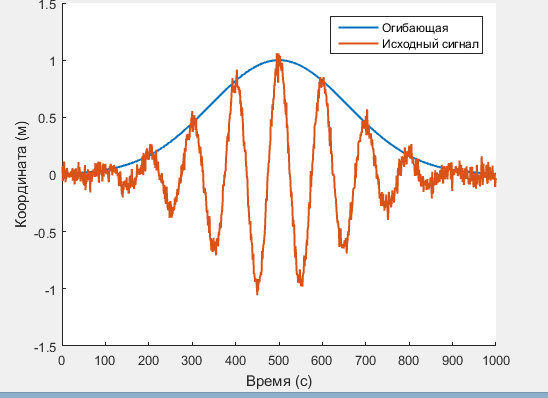
for x = 1:N
A(x) = exp((-(x-500)^2)/50000);
y(x) = A(x)*cos(2*3.14*0.01*x)+normrnd(0,sigmaPsi);
end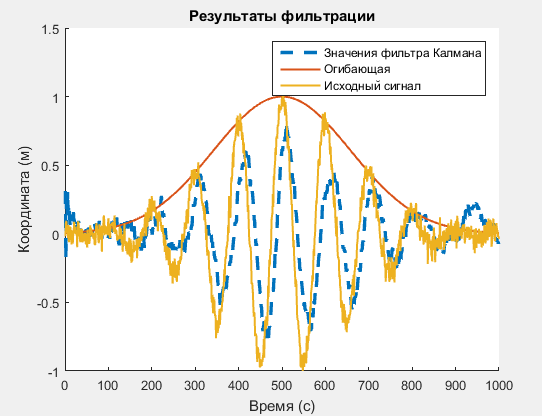
for t=1:(N-1)
eOpt(t+1)=sqrt((sigmaEtaFilter^2)*(eOpt(t)^2+sigmaPsi^2)/(sigmaEtaFilter^2+eOpt(t)^2+sigmaPsi^2)); %минимизация значения ошибки
msum = msum + eOpt(t+1);
sum = sum + (eOpt(1))^2;
K(t+1)=(eOpt(t+1))^2/sigmaEtaFilter^2; %выражение для ошибки
xOpt(t+1)=(xOpt(t))*(1-K(t+1))+K(t+1)*z(t+1);
end;N = 1000;
sigmaPsi=0.05; %реальные погрешности (ошибка модели)
sigmaEtaModel=0.5; %ошибка измерений прибора
sigmaEtaFilter = 0.8;
k=1:N;
x=k;
for x = 1:N
A(x) = exp((-(x-500)^2)/50000);
y(x) = A(x)*cos(2*3.14*0.01*x)+normrnd(0,sigmaPsi);
z(x)=y(x)+normrnd(0,sigmaEtaModel);
end
%kalman filter
xOpt(1)=z(1); %хорошее приближение для истинной координаты
eOpt(1)=sigmaEtaFilter; %дисперсия
msum = eOpt(1);
sum = (eOpt(1))^2;
for t=1:(N-1)
eOpt(t+1)=sqrt((sigmaEtaFilter^2)*(eOpt(t)^2+sigmaPsi^2)/(sigmaEtaFilter^2+eOpt(t)^2+sigmaPsi^2)); %минимизация значения ошибки
msum = msum + eOpt(t+1);
sum = sum + (eOpt(1))^2;
K(t+1)=(eOpt(t+1))^2/sigmaEtaFilter^2; %выражение для ошибки
xOpt(t+1)=(xOpt(t))*(1-K(t+1))+K(t+1)*z(t+1);
end;
sr = msum/N;
vdisp = sum/N - sr^2;
hold all;
plot(k,xOpt,'--','linewidth',2.5);
plot(k,A,'linewidth',1.5);
plot(k,y,'LineWidth',1.5);
title('Результаты фильтрации');
xlabel('Время (с)');
ylabel('Координата (м)');
legend('Значения фильтра Калмана', 'Огибающая','Исходный сигнал');Answer the question
In order to leave comments, you need to log in
In my opinion, using the Kalman filter, you can only smooth the original signal, but not get the "envelope".
The signal is similar to amplitude modulation (radio signal).
https://en.wikipedia.org/wiki/Envelope_detector
https://www.mathworks.com/help/dsp/examples/envelo...
Didn't find what you were looking for?
Ask your questionAsk a Question
731 491 924 answers to any question