Answer the question
In order to leave comments, you need to log in
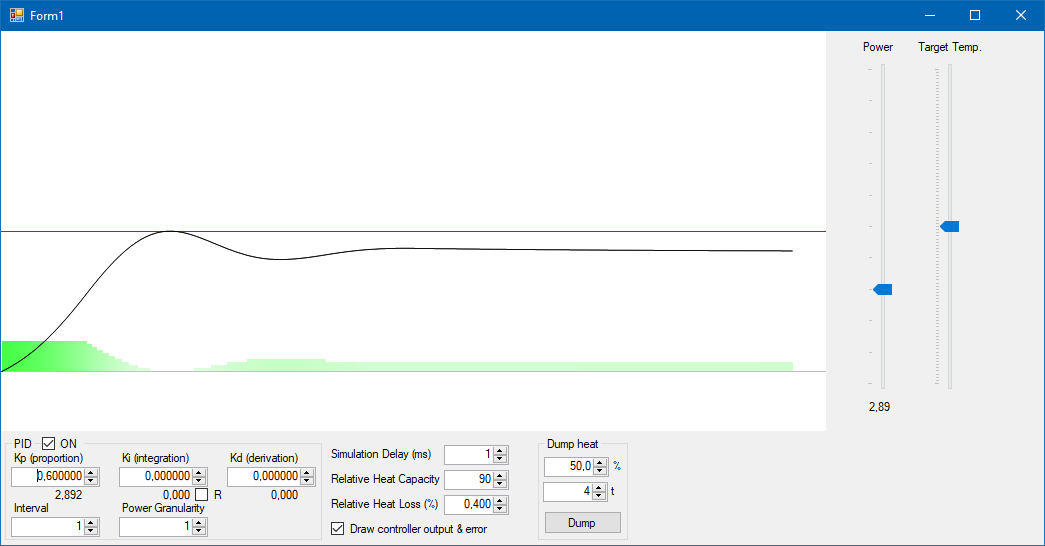
Correct statements about the PID controller?
a.
The "I" parameter must be increased to reduce the error.
b.
The "P" value must be reduced to bring the value closer to the set value.
c.
The 'D' parameter must be increased to reach the setpoint faster.
YES
YES
NO
?
Answer the question
In order to leave comments, you need to log in
I don't know if you want an answer about simulation or about the real world. I will write about the real one.
The I parameter is needed for the system to have zero static error. In this case, the dynamics is likely to worsen.
The parameter P must be increased to reduce the error. But after a certain threshold, the system can fall into self-oscillations.
The D parameter reduces the error in dynamics, but is very sensitive to noise, etc.
In general, the set of parameters P, I, D has, as a rule, some optimum, at which any change will worsen the result. For a given control object, in given operating conditions.
Didn't find what you were looking for?
Ask your questionAsk a Question
731 491 924 answers to any question