Answer the question
In order to leave comments, you need to log in
RS485, MODBUS, why can messages not reach the slave device?
Good day.
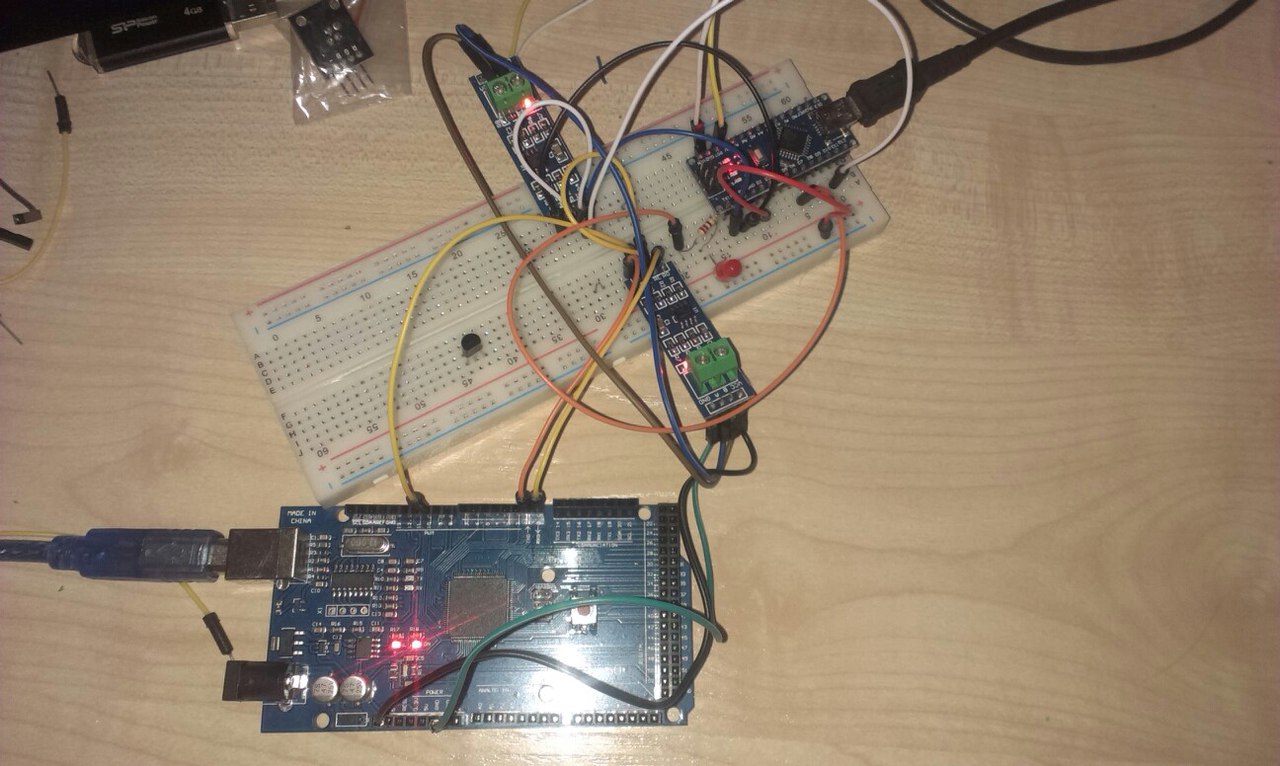
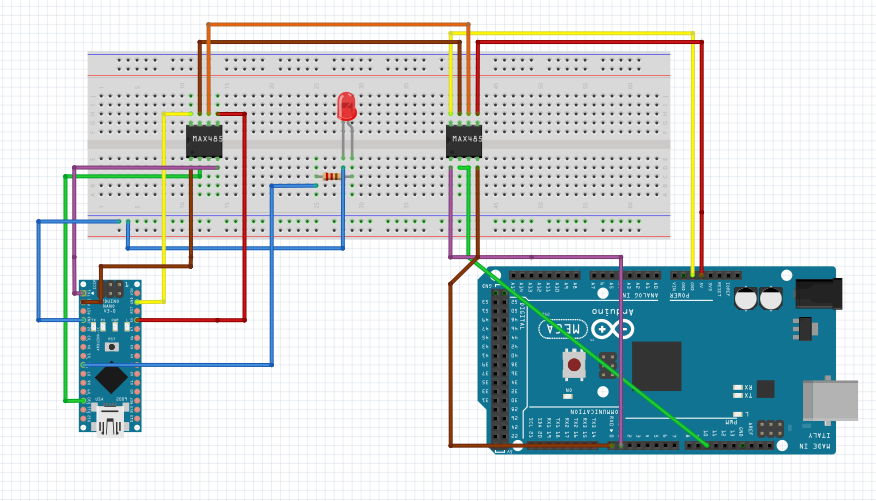
There are two Arduinos, Nano (slave) and Mega (master). The master sends something (RX blinks as expected), the slave does not receive anything (tx, rx are silent).
Here are the sketches.
Master.
#include <ModbusRtu.h>
// data array for modbus network sharing
uint16_t au16data[10];
uint8_t u8state;
#define TXEN 10
/**
* Modbus object declaration
* u8id : node id = 0 for master, = 1..247 for slave
* u8serno : serial port (use 0 for Serial)
* u8txenpin : 0 for RS-232 and USB-FTDI
* or any pin number > 1 for RS-485
*/
Modbus master(0,0,TXEN); // this is master and RS-232 or USB-FTDI
/**
* This is an structe which contains a query to an slave device
*/
modbus_t telegram;
unsigned long u32wait;
void setup() {
master.begin( 19200 ); // baud-rate at 19200
master.setTimeOut( 2000 ); // if there is no answer in 2000 ms, roll over
u32wait = millis() + 1000;
u8state = 0;
}
void loop() {
switch( u8state ) {
case 0:
if (millis() > u32wait) u8state++; // wait state
break;
case 1:
telegram.u8id = 1; // slave address
telegram.u8fct = 3; // function code (this one is registers read)
telegram.u16RegAdd = 4; // start address in slave
telegram.u16CoilsNo = 1; // number of elements (coils or registers) to read
telegram.au16reg = au16data; // pointer to a memory array in the Arduino
master.query( telegram ); // send query (only once)
u8state++;
break;
case 2:
master.poll(); // check incoming messages
if (master.getState() == COM_IDLE) {
u8state = 0;
u32wait = millis() + 100;
}
break;
}
}#include <ModbusRtu.h>
#define ID 1
#define TXEN 10
Modbus slave(ID, 0, TXEN); // this is slave ID and RS-232 or USB-FTDI
boolean led;
int8_t state = 0;
unsigned long tempus;
// data array for modbus network sharing
uint16_t au16data[9];
/**
* Setup procedure
*/
void setup() {
io_setup(); // I/O settings
// start communication
slave.begin( 19200 );
tempus = millis() + 100;
digitalWrite(13, HIGH );
}
/**
* Loop procedure
*/
void loop() {
// poll messages
// blink led pin on each valid message
state = slave.poll(au16data,9);
if (state != 0) {
digitalWrite(6,LOW);
delay(500);
digitalWrite(6,HIGH);
}
if (state > 4) {
tempus = millis() + 50;
digitalWrite(13, HIGH);
}
if (millis() > tempus) digitalWrite(13, LOW );
io_poll();
}
void io_setup() {
// define i/o
pinMode(2, INPUT);
pinMode(3, INPUT);
pinMode(4, INPUT);
pinMode(5, INPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
pinMode(13, OUTPUT);
digitalWrite(6, LOW );
digitalWrite(13, LOW ); // this is for the UNO led pin
}
void io_poll() {
// read analog inputs
au16data[4] = analogRead( 4 );
//au16data[5] = analogRead( 1 );
// diagnose communication
au16data[6] = slave.getInCnt();
au16data[7] = slave.getOutCnt();
au16data[8] = slave.getErrCnt();
}
 Bonus modules
Bonus modules 
Answer the question
In order to leave comments, you need to log in
Didn't find what you were looking for?
Ask your questionAsk a Question
731 491 924 answers to any question