Answer the question
In order to leave comments, you need to log in
How to write an algorithm for finding neighboring elements?
There is an animation in which there are about 200 objects whose coordinates gradually (rather slowly) change in each frame. We need an algorithm that will perform the search for new connections very optimally. The connection should be established when the distance between objects is less than a certain number (it is not necessary to establish a connection directly in the same frame in which the distance becomes close enough, I will also be satisfied with the option when the connection is established a few frames after the distance has become enough small).
If it is trite to sort through the distances for each pair of points, then on each frame there will be a cycle of 40,000 pairs. Pretty big workload. It is necessary, while maintaining the uniformity of the load per frame, to reduce the number of calculations in one frame by at least 10-20 times (and preferably more). I have some ideas, but still wanted to hear the opinions of others.
Answer the question
In order to leave comments, you need to log in
If you store the coordinates in a sorted array (X and Y separately), then you only need to check the nearest neighbors, as long as the difference in coordinates does not exceed your minimum distance. This optimization is the more effective, the smaller the given distance relative to the size of the field. Plus, cache the results of comparisons so as not to check already checked pairs. Further, you can kill the cache not every frame, you can search up the array in even frames, and down in odd frames, etc. But this is already in fact, if necessary.
The idea of having separate work on X and Y works well. On each frame, we check each of the 200 points (this is not much at all).
Sort the array of points by their X-coordinate. We move from left to right, choosing the next point.
We look to the left from it (in order not to check one connection twice, we select a half-plane from the point) and select only those points whose X differs by no more than radius.
Of these, we look only at those for which Y differs by no more than a radius (already in any direction: both up and down).
They already check the Euclidean distance - the root of the sum of the squared distances in X and Y - so that it is no more than radius. These have a “connection” - we draw an edge for them.
On a computer it gives about 60 fps, on a mobile phone from 40 to 55, i.e. perfectly acceptable speed at 200 points.
Интересна ситуация, наихудшая для оптимизации: когда за 1 кадр может поменяться максимальное число связей. Предположу, что это сетка из равносторонних треугольников, где длина ребра равна «триггерной» дистанции:
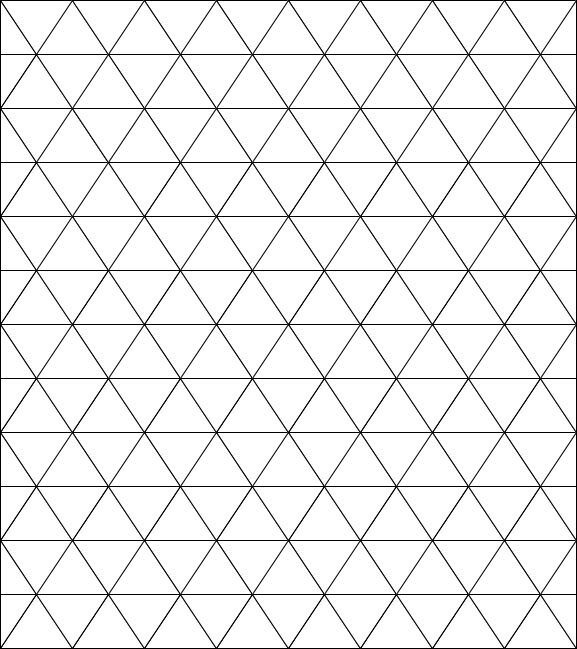
200 * 6 / 2 = 600 связей (чуть меньше из-за краёв).W = Math.max(0, D - Math.abs( length - D))/D, где D – пороговая дистанция.W * (time - timeUpdated)Cluster analysis?
If you studied at a university were supposed to pass, this is just the case when academic knowledge can come in handy.
Didn't find what you were looking for?
Ask your questionAsk a Question
731 491 924 answers to any question