Answer the question
In order to leave comments, you need to log in
How to find the rotation matrix between two objects?
Hello. I have an Object, let's say "Fork". I know its initial coordinates. Position and rotation matrix.
Then I rotated it and I also know the final results and the rotation matrix.
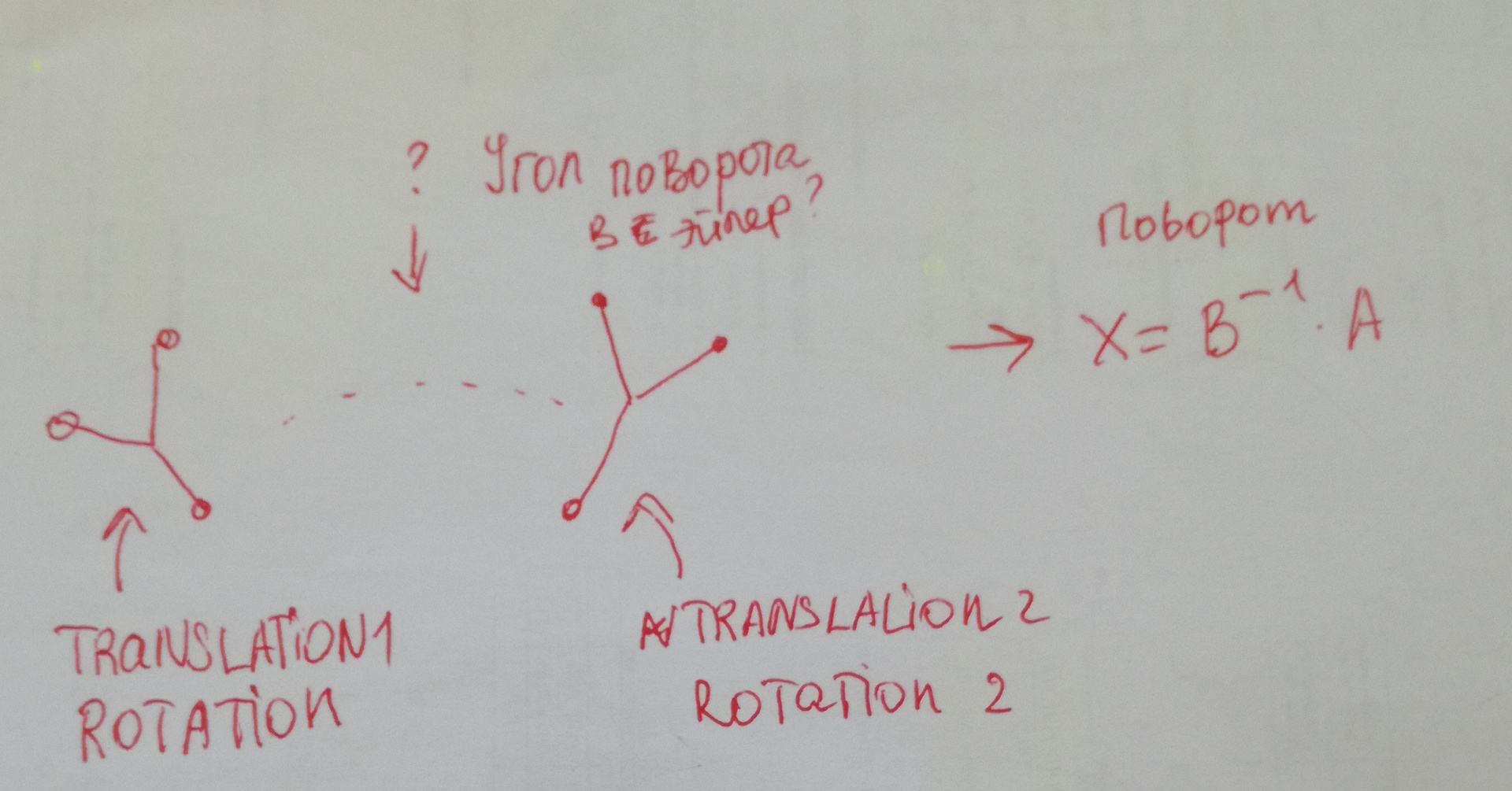
How to find now how many degrees the fork was rotated in euler angle.
I think it's like in the picture.
Matrix X came out. I inserted it into the converter. On that website.
https://www.andre-gaschler.com/rotationconverter/
Good angles come out, real ones. But how does the converter calculate the second rotation matrix? That is, on the left ..
Or am I doing everything wrong?
Help me please. 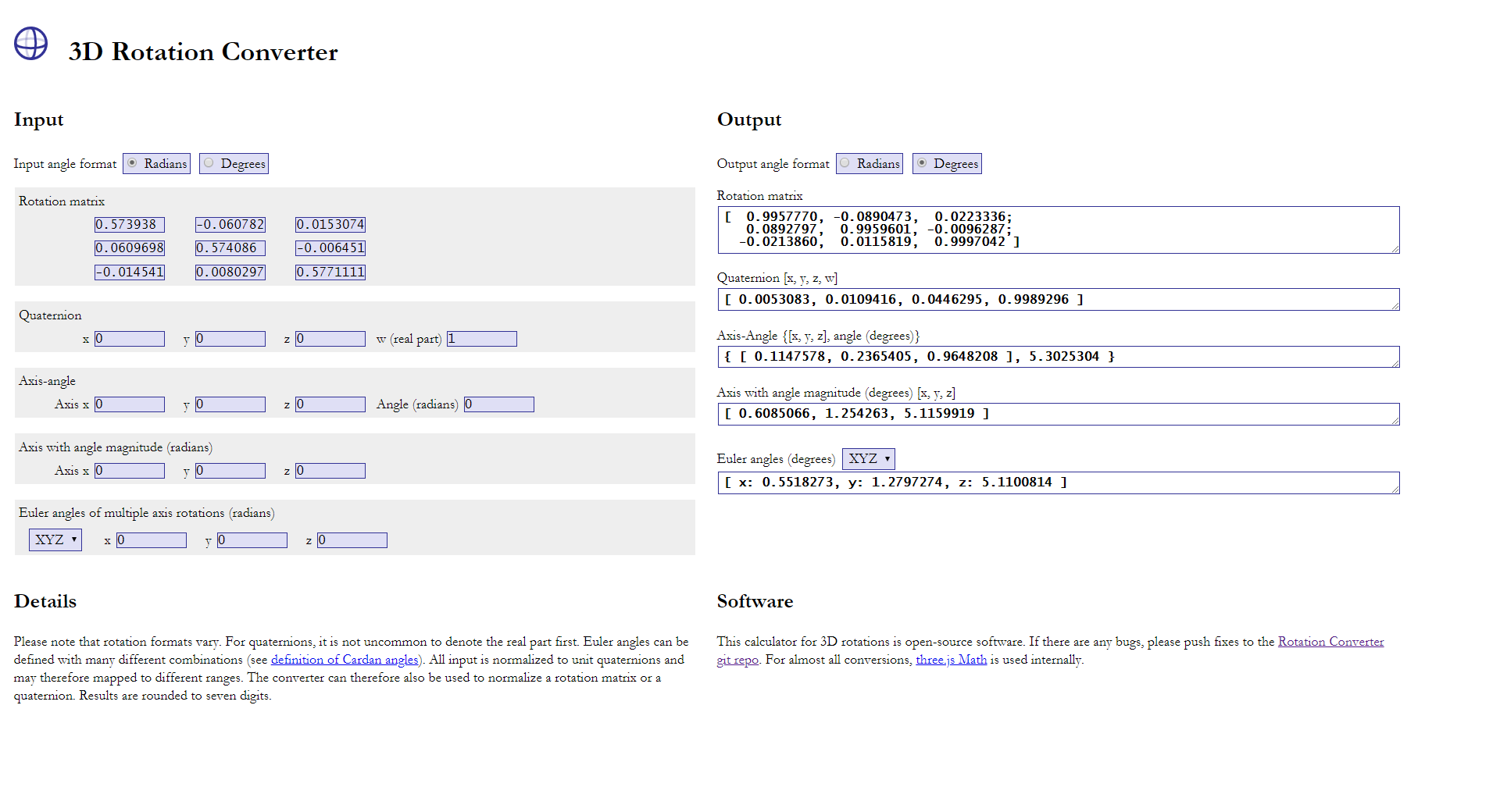
Fork Matrix A
[ 0.186812, -0.908758, 0.373175;
-0.954698, -0.0783737, 0.287069;
-0.231629, -0.409897, -0.882231][ 0.291274, -0.888062, 0.355676;
-0.933193, -0.181957, 0.309906;
-0.210498, -0.422182, -0.881733]Answer the question
In order to leave comments, you need to log in
Didn't find what you were looking for?
Ask your questionAsk a Question
731 491 924 answers to any question